Correct IO Delay#
vortex facilitates correction of IO delay through scan pattern lookahead.
When added to the engine, each IO component is associated with its number of lookahead samples through the lead_samples argument of EngineConfig.add_io(), which defaults to 0 if not specified.
vortex will then drive the IO component with scan waveforms that are time-shifted by that number of samples into the future, thereby canceling out IO delay.
The Python demo engine exposes this capability through the galvo_delay configuration parameter.
Tuning Delay#
vortex provides a galvo tuning demo at demo/galvo_tuner.py which can help determine the best value of lead_samples without needing to digitize scan waveforms.
The approach is to take bidirectional repeated B-scans and adjust lead_samples until features in the forward and backwards sweep align.
The galvo tuner shows the en face projection of the repeated B-scan stack, each of which alternates directions, and the en face average for each direction.
The galvo delay spinbox is adjusted until the best alignment is achieved, as shown below.
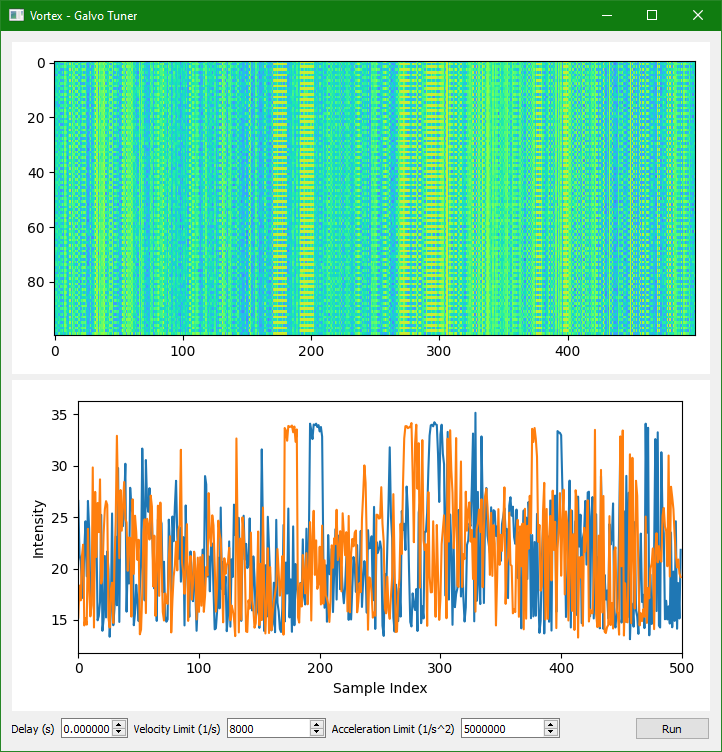
Initial galvo delay of 0 ms.#
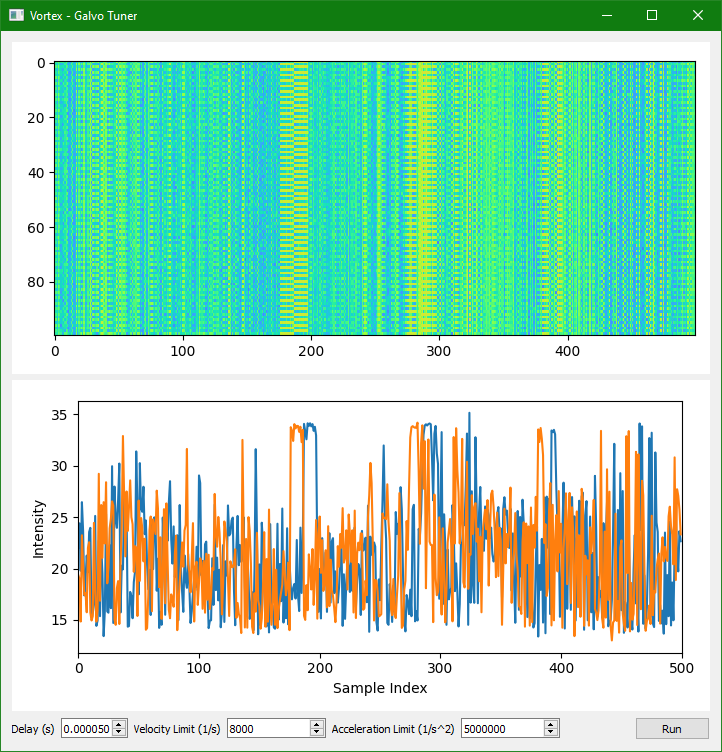
Partial improvement with galvo delay of 50 ms.#
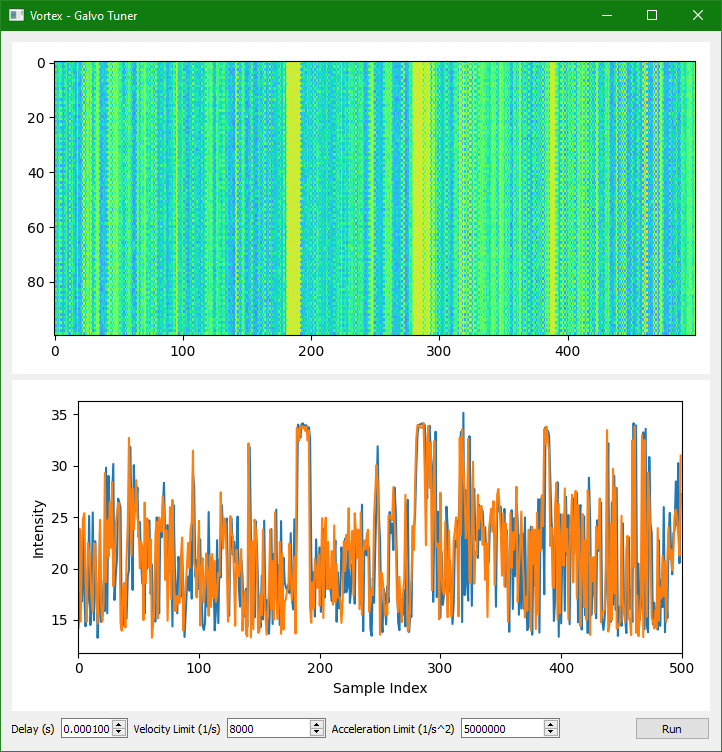
Best alignment with galvo delay of 100 ms.#
This last screenshot shows the best overlap that could be obtained for this system.
The optimal galvo delay is therefore 100 ms.
Note that the resolution of lead_samples in time is determined by the trigger rate.
Tuning Dynamics Limits#
The galvo tuner also allows adjustment of scan velocity and acceleration limits which affect scan alignment and distortion. This is especially so for excessively high acceleration limits. Tuning of dynamic limits is best done with a target that has a regularly spaced pattern.
Start by entering the maximum velocity for your galvanometers, as determined from the driver slew rate limit or datasheet.
Tune the acceleration setting.
If the pattern appears regular, increase the acceleration limit until distortion is observed. Set your acceleration limit slightly below the value at which distortion is observed.
If the pattern appears distorted on the ends, decrease the acceleration limit until the distortion disappears. Set your acceleration limit slightly below the value at which distortion resolves.
Tune the velocity setting slightly to see if any residual distortion resolves.
Best results for tuning dynamics limits are obtained by recording the galvo position feedback and comparing to the drive waveforms, which is beyond the scope of this demo.